
Мини-робот поможет стоматологам быстрее готовить зубы к установке коронок
Инженеры создали миниатюрного стоматологического робота для подготовки зубов под коронки. В будущем такая система может сократить число визитов к врачу и сделать лечение точнее.
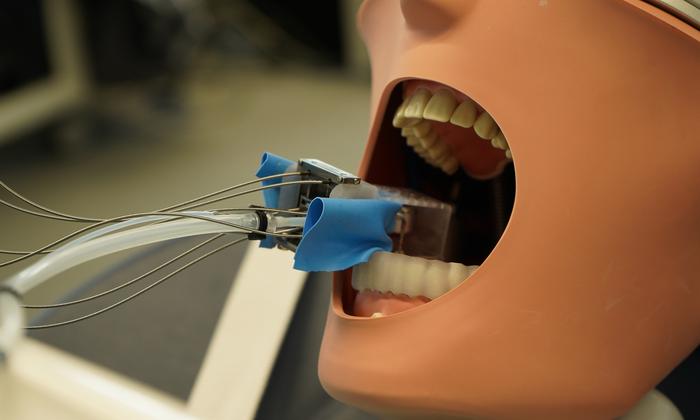
Источник: Catherine Weyer.
МОСКВА, 24 июня. /Новости науки/. Европейские инженеры разработали миниатюрного робота, который может автоматически готовить зубы к установке коронок, статья об этом опубликована в журнале IEEE Transactions on Medical Robotics and Bionics.
Прототип получил название MIR — Miniature Intraoral Robot, то есть «миниатюрный внутриротовой робот». Его размер составляет 43 на 26 на 28 миллиметров. По словам разработчиков, робот достаточно мал, чтобы удобно помещаться в открытом рту пациента.
Сейчас установка коронки обычно требует нескольких визитов. Сначала стоматолог удаляет кариес, готовит зуб, делает слепок и ставит временную коронку. Затем по слепку изготавливают постоянную коронку, которую устанавливают позже.
Новая система должна упростить этот процесс. Стоматолог сможет сделать цифровое сканирование зуба уже на первом приеме. После этого врач составит план обработки, а робот точно удалит нужный объем ткани зуба. На основе того же скана можно будет сразу заказать коронку.
Робот крепится к индивидуальной зубной шине. Ее изготавливают под конкретного пациента. Это важно, потому что система движется вместе с головой человека. Если пациент слегка повернет голову, робот сохранит свое положение относительно зуба.
Разработчики испытали MIR на моделях зубов из синтетической смолы и на керамическом материале, по твердости близком к зубной эмали. Робот работает в два этапа. Сначала широкое сверло снимает материал сверху. Затем более длинное и тонкое сверло обрабатывает боковые поверхности зуба.
Даже без встроенных датчиков точность робота уже оказалась высокой. В испытаниях ошибка положения была меньше 0,2 миллиметра. Ученые считают, что после добавления датчиков ее можно будет еще уменьшить.
Исследователи также измерили силу, с которой робот воздействует на зуб во время сверления. Она оставалась ниже пяти ньютонов. Это примерно соответствует силе тяжести полулитровой бутылки воды. Кроме того, команда оценивает шум системы, чтобы понять, насколько она подходит для обычной стоматологической практики.
До применения MIR в клиниках еще нужно провести дополнительные работы. В следующей версии инженеры планируют встроить в робота датчики и камеру. Они позволят системе отслеживать свое положение и ход лечения. По словам руководителя группы Георга Раутера, даже после отключения питания робот должен будет понимать, где он находится и с какого места нужно продолжить работу.
Прототип получил название MIR — Miniature Intraoral Robot, то есть «миниатюрный внутриротовой робот». Его размер составляет 43 на 26 на 28 миллиметров. По словам разработчиков, робот достаточно мал, чтобы удобно помещаться в открытом рту пациента.
Сейчас установка коронки обычно требует нескольких визитов. Сначала стоматолог удаляет кариес, готовит зуб, делает слепок и ставит временную коронку. Затем по слепку изготавливают постоянную коронку, которую устанавливают позже.
Новая система должна упростить этот процесс. Стоматолог сможет сделать цифровое сканирование зуба уже на первом приеме. После этого врач составит план обработки, а робот точно удалит нужный объем ткани зуба. На основе того же скана можно будет сразу заказать коронку.
Робот крепится к индивидуальной зубной шине. Ее изготавливают под конкретного пациента. Это важно, потому что система движется вместе с головой человека. Если пациент слегка повернет голову, робот сохранит свое положение относительно зуба.
Разработчики испытали MIR на моделях зубов из синтетической смолы и на керамическом материале, по твердости близком к зубной эмали. Робот работает в два этапа. Сначала широкое сверло снимает материал сверху. Затем более длинное и тонкое сверло обрабатывает боковые поверхности зуба.
Даже без встроенных датчиков точность робота уже оказалась высокой. В испытаниях ошибка положения была меньше 0,2 миллиметра. Ученые считают, что после добавления датчиков ее можно будет еще уменьшить.
Исследователи также измерили силу, с которой робот воздействует на зуб во время сверления. Она оставалась ниже пяти ньютонов. Это примерно соответствует силе тяжести полулитровой бутылки воды. Кроме того, команда оценивает шум системы, чтобы понять, насколько она подходит для обычной стоматологической практики.
До применения MIR в клиниках еще нужно провести дополнительные работы. В следующей версии инженеры планируют встроить в робота датчики и камеру. Они позволят системе отслеживать свое положение и ход лечения. По словам руководителя группы Георга Раутера, даже после отключения питания робот должен будет понимать, где он находится и с какого места нужно продолжить работу.




















